1 / 3
1 / 3Vision-gebaseerde Pick & Place-toepassing met roterende grijper




Prijs Hardware:
Flexibiliteit
hoog
Precisie
Hoog
DOF
3
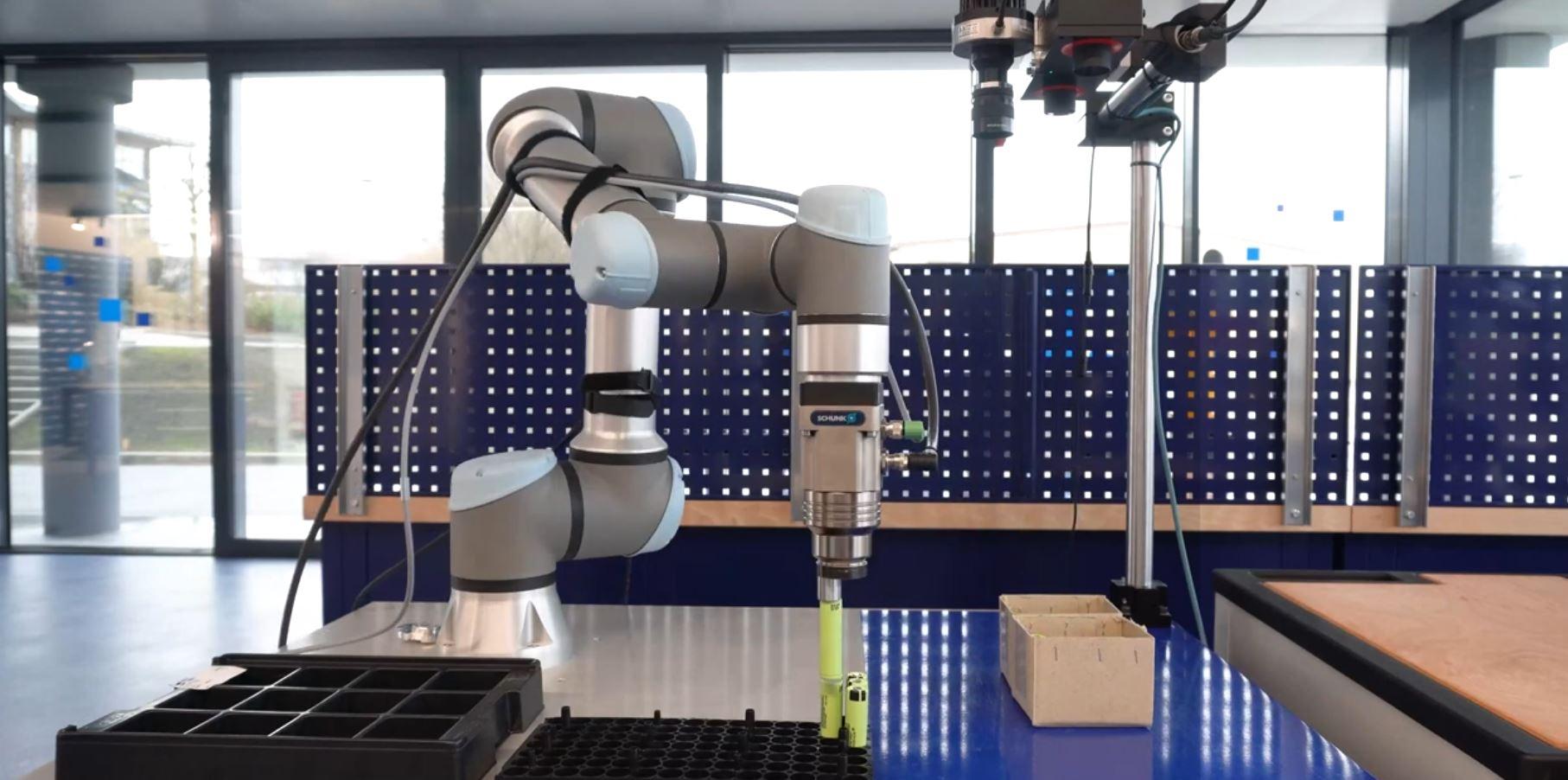
Deze video toont een testopstelling van een klant waarin kleine onderdelen worden verplaatst op een transportband in een robotcel.
Aan het begin van de video zien we hoe de kleine onderdelen op de eerste transportband worden geplaatst. Vervolgens worden ze naar de robotcel getransporteerd. Een camera die strategisch in de cel is geplaatst, detecteert de exacte positie van de onderdelen op de band.
Zodra de camera de coördinaten van de onderdelen heeft vastgelegd, wordt deze informatie doorgegeven aan een deltarobot die bovenop is gemonteerd. Deze robot is uitgerust met een pneumatische roterende grijper die de onderdelen precies grijpt.
De deltarobot beweegt dan, gestuurd door de coördinaten van de camera, en plaatst de onderdelen altijd in dezelfde oriëntatie op de tweede transportband.
De video eindigt met een close-up van de onderdelen die correct op de tweede transportband zijn geplaatst. Dit proces demonstreert de precisie en efficiëntie van de robotcel bij het verwerken van kleine onderdelen.
Samengevat is deze video een uitstekende weergave van de toepassing van moderne robottechnologie in productie en assemblage. Het laat zien hoe efficiënte en nauwkeurige handling van kleine onderdelen kan worden bereikt door het gebruik van camera's, deltarobots en pneumatische roterende grijpers.
4 onderdelen