 1 / 3
1 / 3Oogstrobot




Prijs Hardware:
Gewicht
licht
Textuur
Vuilbestendig
Modulair
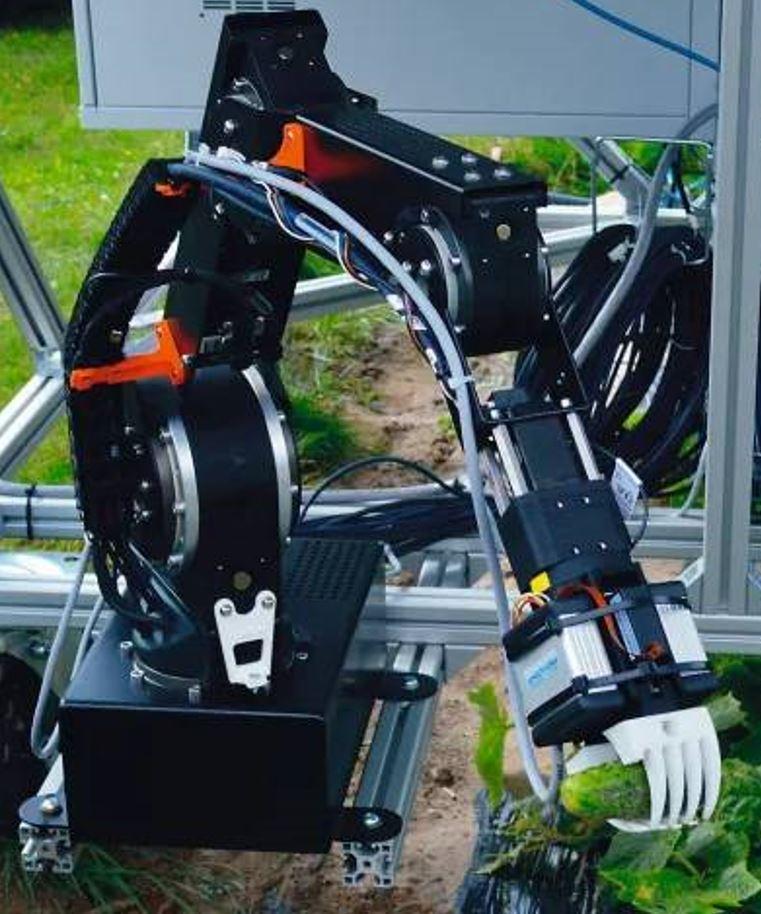
Het prototype Catch werd ontwikkeld binnen een kort onderzoeksproject van 18 maanden om te helpen bij het oogsten van komkommers. Vooral het seizoensgebonden en kortdurende oogstwerk wordt vaak als onaantrekkelijk beschouwd, waardoor er een tekort aan arbeidskrachten is. Dit is precies waarom automatisering een belangrijke rol speelt in de landbouw. Met behulp van robots kan er sneller worden geoogst. Met name het oogsten van komkommers is een moeilijke en uitdagende taak, omdat de robot een groen object moet herkennen in een groene en overdekte omgeving. De Catch kon al aan deze eisen voldoen met behulp van twee Robolink-robots van igus, maar de ontwikkeling vereist nog verder onderzoek en verbeteringen, zodat de herkenning en scheiding van komkommers verder kan worden verbeterd om een efficiënt en verkoopbaar product te kunnen aanbieden.
1 onderdeel








