1 / 3
1 / 3Vision-gebaseerde handling van deksels met igus ReBeL Cobot




Prijs Hardware:
DOF
6
Plug en Play
eenvoudig te
integreren
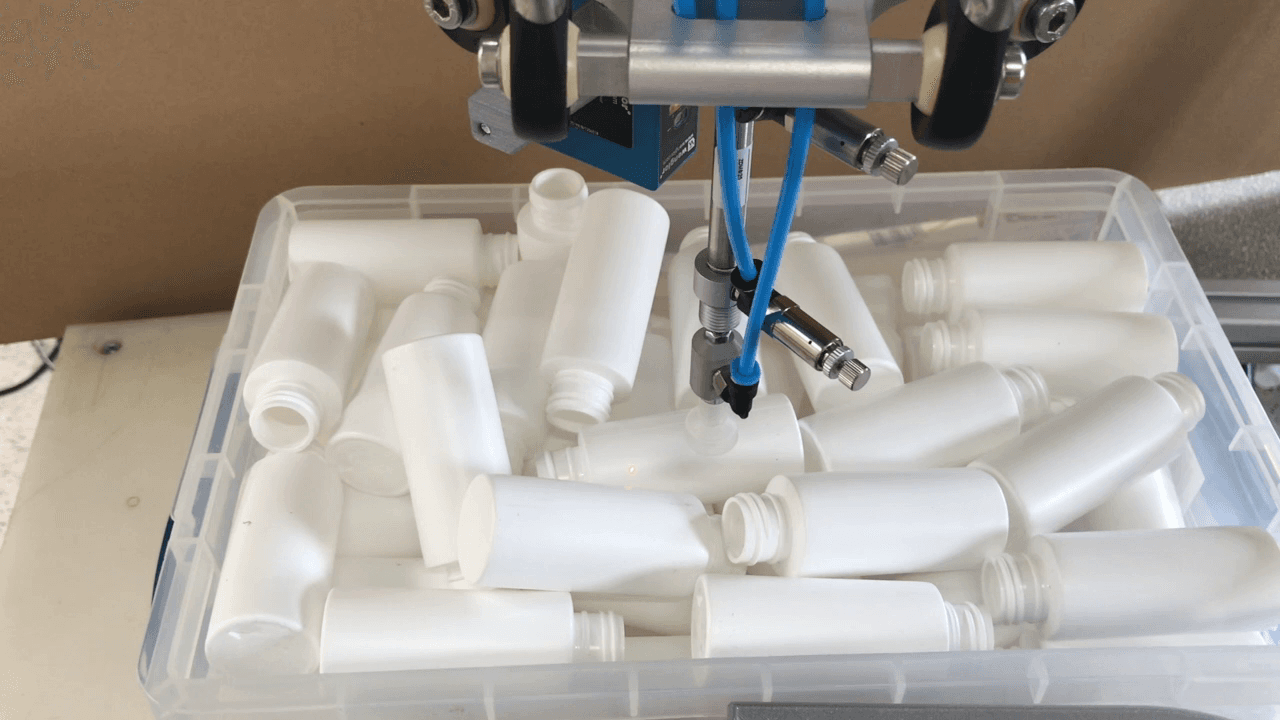
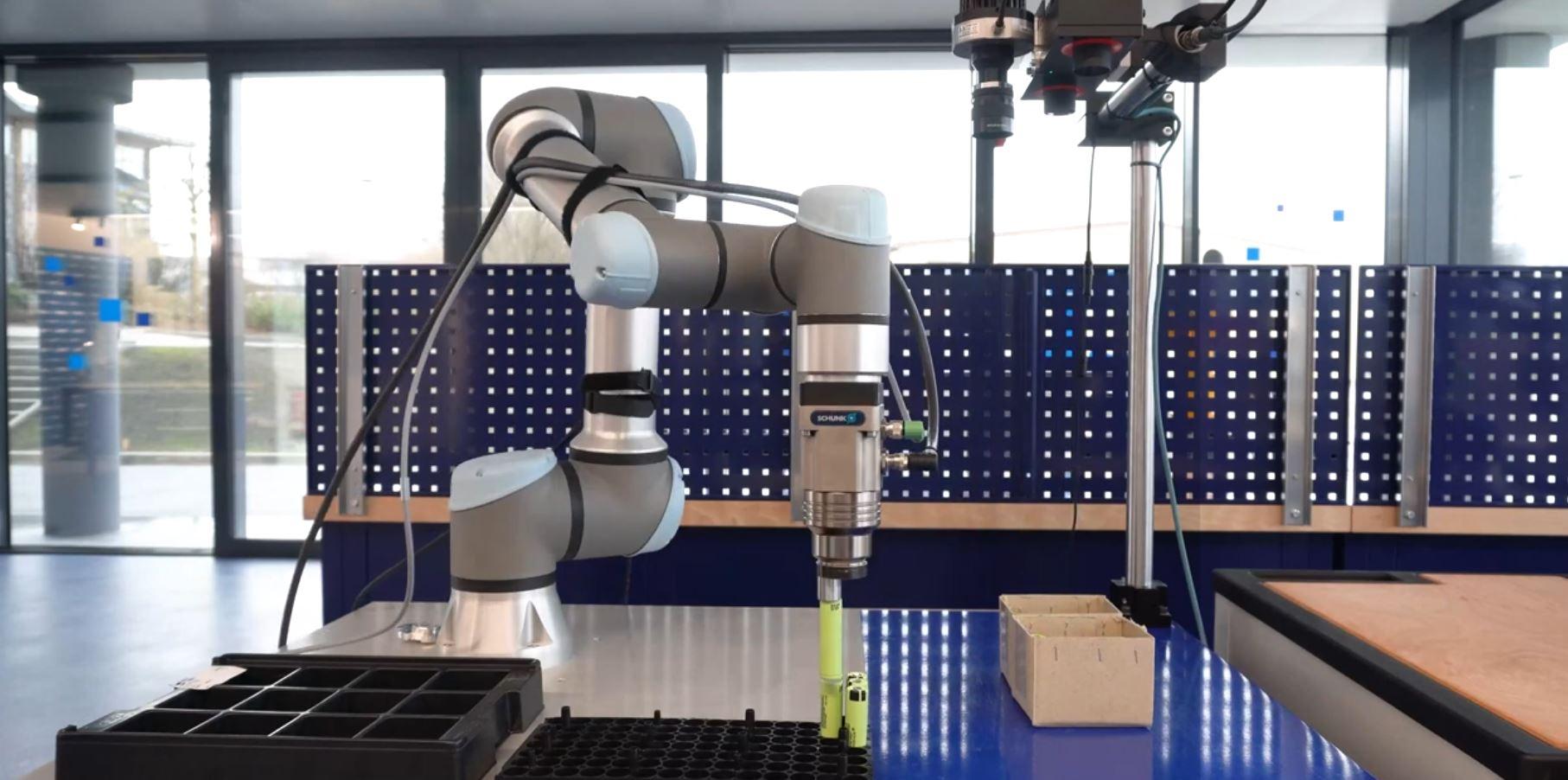
In deze video wordt een geavanceerd pick-and-place-systeem gepresenteerd dat deksels nauwkeurig hanteert en positioneert. Het systeem gebruikt een ifm-sensor en een camera voor objectherkenning om de deksels te identificeren en hun positie te bepalen. De igus ReBeL 6DOF (zes vrijheidsgraden) robotarm is uitgerust met een zuiggrijper die de deksels stevig vastgrijpt en in de gewenste positie plaatst.
De integratie van de ifm sensor maakt naadloze communicatie met de software-interface mogelijk, wat zorgt voor een efficiënte besturing van het hele proces. De software biedt een intuïtieve gebruikersinterface en stelt gebruikers in staat om de robotarm en de zuiggrijper nauwkeurig te besturen voor optimale pick-and-place prestaties.
De combinatie van de ifm sensor, de camera en de igus ReBeL 6DOF robotarm biedt een krachtige oplossing voor geautomatiseerde pick-and-place taken. Dit systeem is ideaal voor toepassingen waarbij snelheid, nauwkeurigheid en betrouwbaarheid van cruciaal belang zijn.
5 onderdelen